
The second half of Module 6 for GIS Applications conducts Least-Cost Path and Corridor Analysis on two scenarios. The first continues working with the Jackson County, Oregon datasets from Scenario 2.
There are several ways that GIS measures distance. Euclidean, the simplest, represents travel across a straight line or “as the crow flies”. Manhattan distance simulates navigating along a city street grid, where travel is restricted to either north-south and east-west directions. Network Analysis models travel in terms of time, where travel is restricted by a road network or transit infrastructure.
Least-Cost Path Analysis models travel across a surface. It determines the single best course, a polyline, that has the lowest cost for a given source and destination, which are represented by points. This can be described as the routing over a landscape that is not restricted by road networks.
The course through the landscape is modeled as a cost. More specifically each cell in a cost raster has a value which represents the cost of traveling through it.
Typical cost factors are slope and land cover. A cost surface can vary from just a single factor to a combination of them. Even if multiple factors are considered, the analysis only uses a single cost raster.
Least-Cost Path Analysis can be expanded to Corridor Analysis. Instead of resulting in a single base solution represented by a polyline, corridor analysis produces multiple solutions, representing a zone where costs are close to the least cost. The corridor width uses is somewhat subjective. It is controlled by deciding what range of cost to consider. Values of a few percentage points above the lowest cost to as much as 10% above the lowest cost are common.
Scenario 3 uses least-cost path analysis on an area of land in the planning for a potential pipeline. Cost factors include elevation, proximity to rivers and potential crossings of waterways. Datasets used for these cost factors include a DEM, a rivers feature class and feature classes determining the source and destination of the proposed pipeline. Analysis proceeds focusing on each cost factor individually.
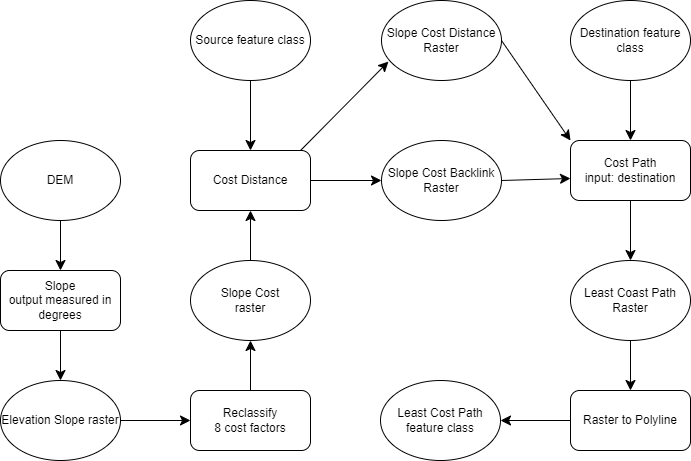
Geoprocessing flowchart for least-cost path analysis factoring solely on slope
Focusing first on the DEM, the raster is converted to a slope raster, and subsequently reclassified using a cost factor range of eight values. The next analysis step utilizes the Cost Distance geoprocessing tool. Using an iterative algorithm, a cost distance raster is generated that represents the accumulated cost to reach a given cell from the source location point.
A cost backlink raster is also created, which traces back how to reach a given cell from the source. This reveals the actual path utilized to obtain the lowest cost. The actual cell values of the backlink raster represent either cardinal directions or the intercardinal point (NE, NW, etc.) instead of cost. The combination of the two output rasters contain every least cost path solution from the single source to all cells within the study area.
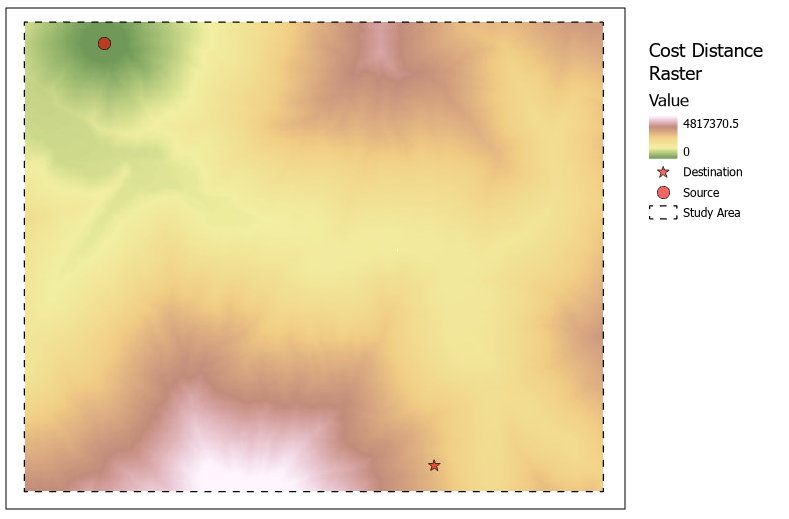
Cost Distance Raster - Values represent the cost of traveling through a cell
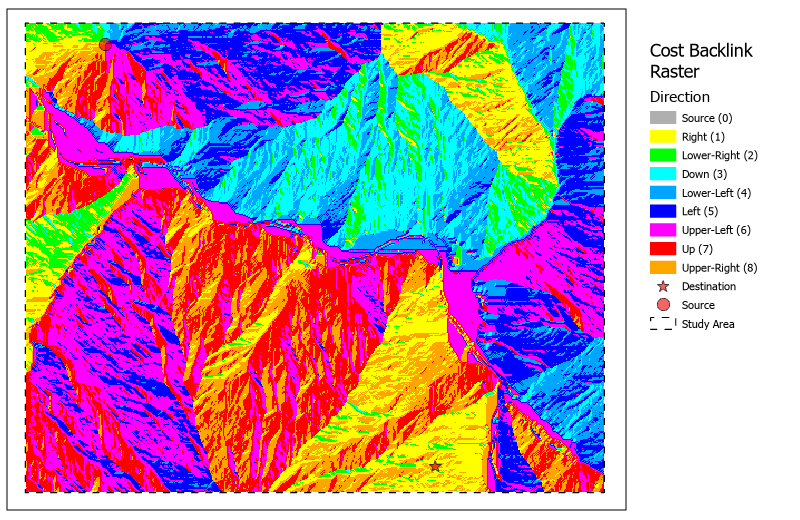
Cost Distance Backlink Raster Cost Distance Backlink Raster - Values correspond with compass directions
The final step of least cost path analysis obtains the least cost path from the source to one or more destinations. The result of the Cost Path geoprocessing tool, this consists of a single polyline representing the lowest accumulated cost.
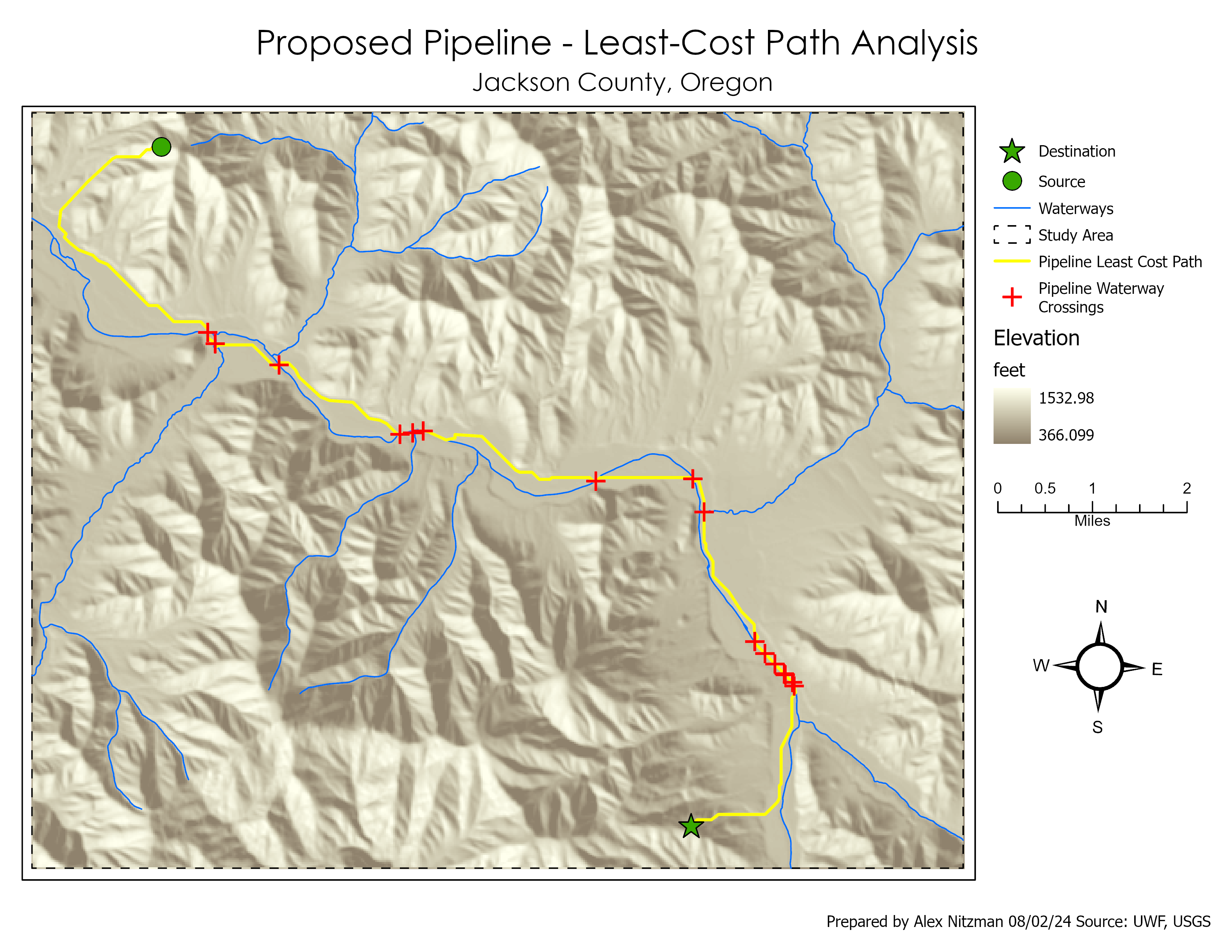
The result of Least-Cost Path Analysis solely on slope
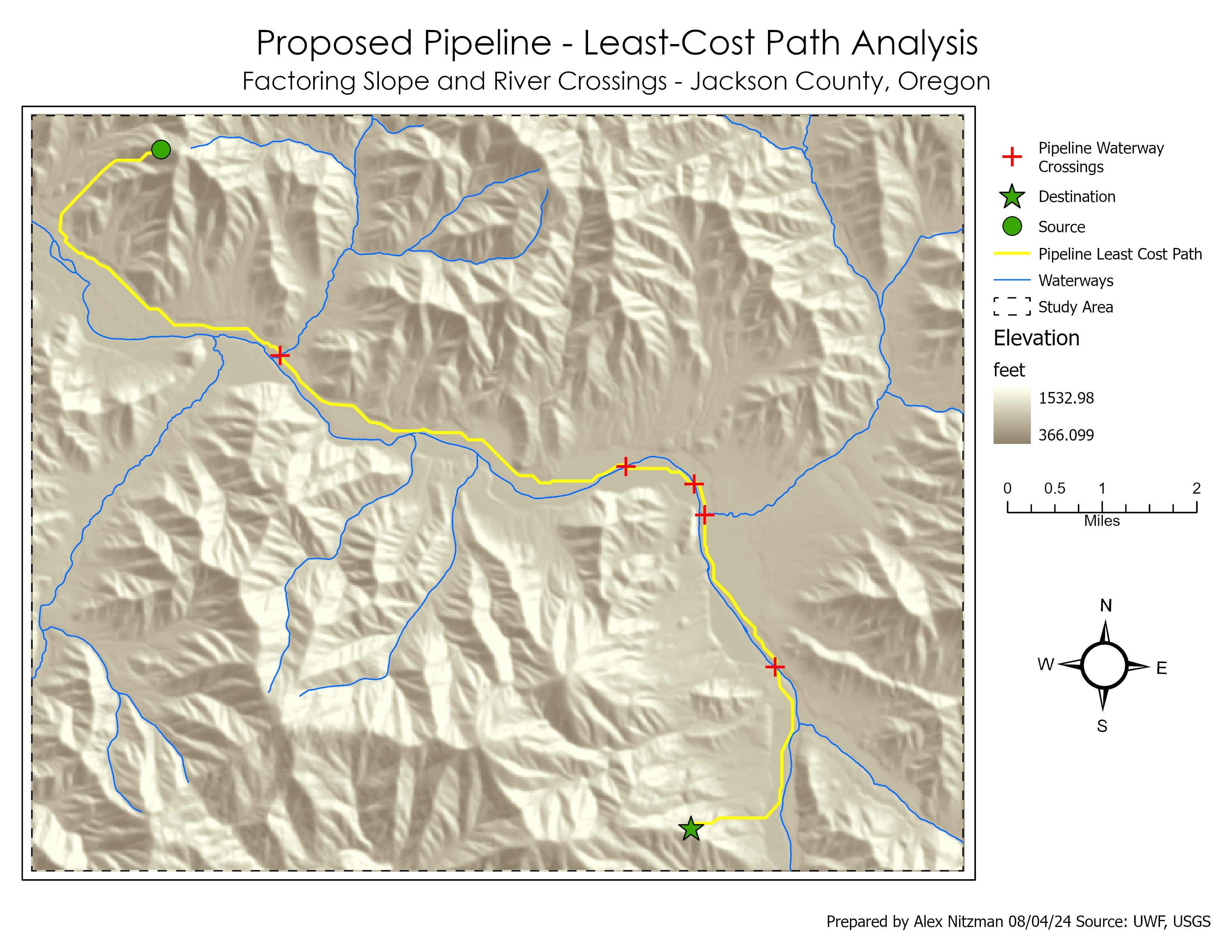
Continuing our analysis of a proposed pipeline in Jackson County, Oregon, we factor in river crossings as a cost factor.

Geoprocessing Flowchart for Scenario 3 - Analysis E Geoprocessing flowchart for least-cost path analysis factoring in both slope and river crossings
The result of factoring in river crossings to the cost analysis reduces potential crossings to five from the 16 when factoring in slopes alone:
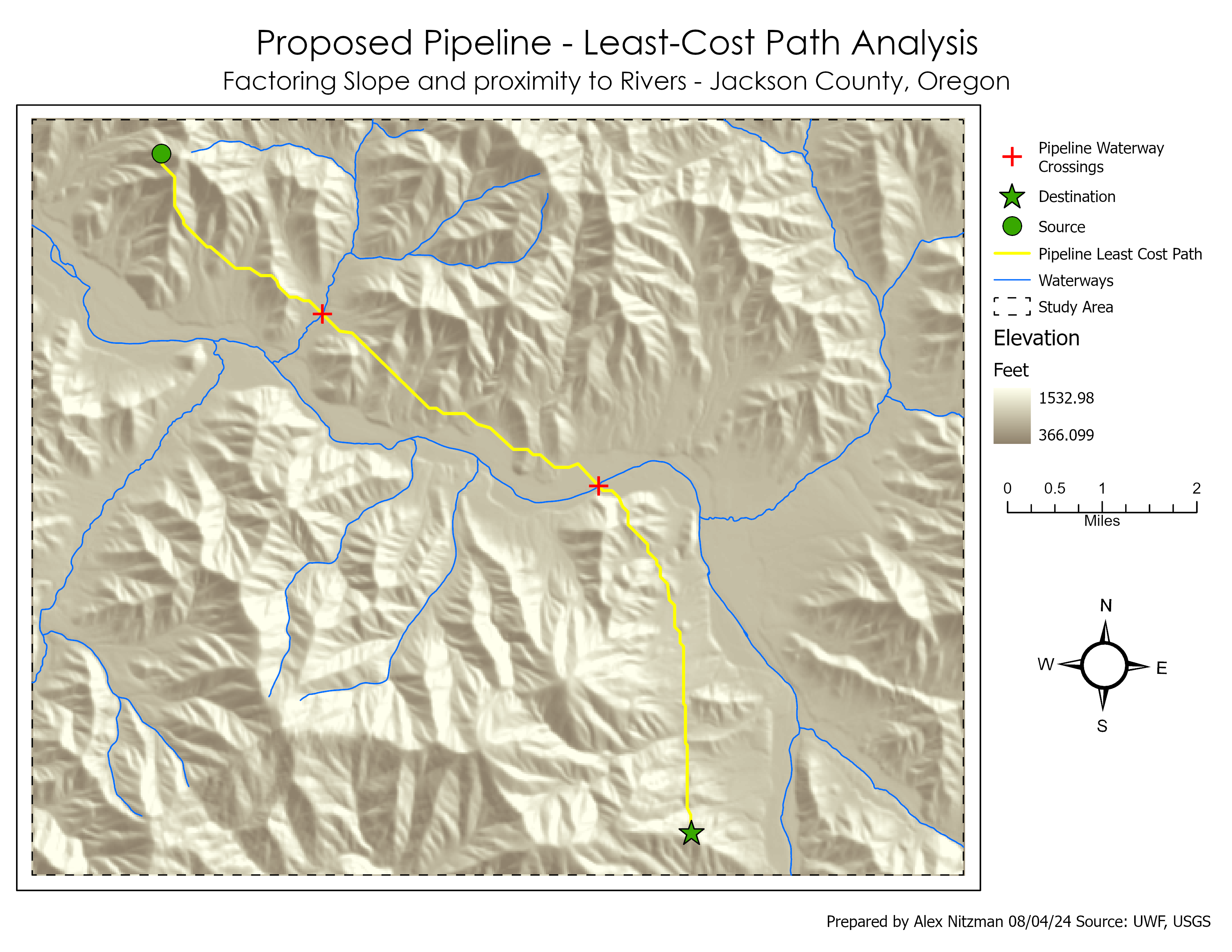
Furthering our analysis, we change from factoring in river crossings to instead factor in the distance to waterways. Using a multiple ring buffer, cost factors are set high for areas within 100 meters of hydrology and moderate for areas within 500 meters. Distances beyond 500 meters from a waterway are zero, reflecting no cost.
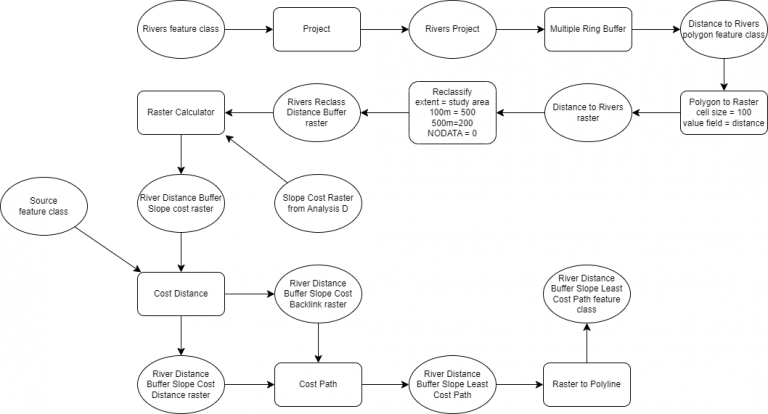
Geoprocessing flowchart for least-cost path analysis factoring slope and proximity to waterways
As the cost factor criterion for the least-cost path analysis is adjusted to better compensate natural factors, the least cost path adjusts accordingly:
The final analysis for third scenario looks at Least-Cost Path Corridor Analysis, which not only includes the least-cost path, but also a multiple of other least-cost alternatives within a corridor determined on a case-by-case basis.

Geoprocessing flowchart for least-cost path corridor analysis
The geoprocessing to develop the least-cost path corridor utilizes the previously generated cost raster factoring in the proximity to waterways and slope. Instead of using the source point as the feature source data, the Cost Distance tool is based off the destination point feature class.






{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}